02# 센서 데이터 분석
문제 정의
센서가 수평이 아닌 채로 부착되기 때문에 기본값을 0으로 설정 해야 한다.
모든 값들을 0으로 만들어버리고 시작하면 되지 않느냐?
오토바이 출발 상태가 어떨지 파악할 수 없음 무조건 0 값이라고 판단이 불가능함.
이를 처음에 “완벽한 수평” 상태로 만들지 않으면 향후 계산에 오류가 생길 가능성이 높음.
본 분석을 통해 센서 데이터의 ‘완벽한 수평값’을 도출하고 변동폭이 큰 값(독립 변수)을 먼저 구한 뒤 이에 따라 영향을 받는 값(종속 변수)의 변화 역시 파악할 예정
수평 계산이기 때문에 특정한 값 하나만 움직일 것이다.
시각화 해서 변동하는 특정 센서 값들만 추출이 필요함.
만약 눈에 보이는 변화가 측정이 가능할 시 상관관계를 분석하여 관계성을 파악함.
데이터 수집
직접 수집
데이터 전처리

수평은 Y축과 밀접한 관련이 있기 때문에 Y축에 대한 데이터만 불러옴
결측값 제거
탐색적 데이터 분석 (EDA: Exploratory Data Analysis)

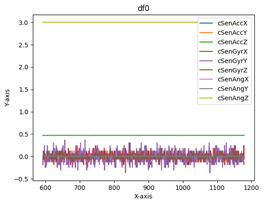


Y값 변화 시에 cSenGyrX(빨간색)와 cSenAngX(분홍색)이 큰 폭으로 변화함
향후 보정 할 시 두 값을 중점적으로 보정 必

추가 분석에 대한 재고를 위해 히트맵을 구성

cSenAccY 값과 cSenAngZ 값이 0.86으로 높은 상관관계를 보여 오차분석 등을 통해 값에 대한 보정이 요구됨
추가분석
cSenAngZ 값에도 변화가 있어서 GyrX와 AngX를 독립변수로 잡고 AngZ를 종속변수로 잡아 회귀 계수와 절편을 추정하여 또 다른 요인이 있는지 분석해봄

회귀계수가 –0.0021과 0.0512이므로 독립 변수와 종속 변수 사이에 약한 음의 선형 관계가 있다고 파악할 수 있음.
결과 해석
Stand(무결정) 상태의 데이터가 필수적으로 요구됨.
기종별 Stand 상태에 대한 테스트 데이터를 구축할 수 있다면 cSenGyrX, cSenAngX 값에 대한 보정만 이뤄지면 될 듯함.
나머지 종속 변수들은 유의미한 변화는 없으나 이는 결국 “Stand” 값이 필수적으로 필요함.
기종별 STAND 상태 데이터 필요.